熱線:021-66110810,66110819
手機:13564362870
熱線:021-66110810,66110819
手機:13564362870
Blue Road Research布拉格光柵光纖濕度傳感器采用基于應變的方法測量相對濕度。光纖布拉格光柵的行為類似于窄帶陷波濾波器。它反射一個窄帶寬的光,其帶寬由光柵的總長度決定,中心頻率由光柵之間的間距決定。因此,通過監測反射信號的中心波長,可以精確跟蹤光柵間距的彈性應變引起的變化。光纖涂有對濕度敏感的聚酰胺薄膜,該薄膜對相對濕度的變化呈線性響應。(薄膜隨相對濕度增加而膨脹,在光纖光柵中引起拉伸應變。)然而,由于玻璃纖維的熱膨脹特性,探針也對溫度呈線性響應。因此需要溫度校準來提取僅由相對濕度變化引起的探針信號部分。作為近似,布拉格光柵濾波器響應的中心波長可以建模為與溫度和相對濕度呈線性依賴關系:

其中lambda0,kRH和kT必須通過校準確定。在校準過程中,將濕度傳感器和參考濕度傳感器(SHT11,Sensirion,Westlake Village,CA)置于環境試驗箱(SM-3.5S,Thermotron,Holland,MI)內。然后將試驗箱編程在20、30和40°C下使相對濕度在40%到80%RH之間變化。定期采樣參考傳感器的溫度和相對濕度、布拉格光柵反射光的中心波長以及探針溫度。然后通過將參考傳感器獲得的相對濕度值與使用濾波器中心波長計算的值進行擬合來獲得校準常數。
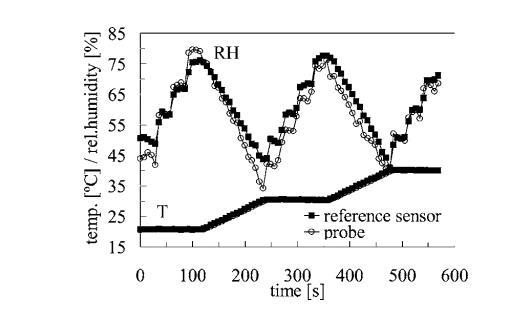
圖2顯示了在典型校準過程中,參考傳感器隨時間變化的相對濕度和溫度讀數,以及光纖濕度探針經溫度校正后的相對濕度讀數。濕度每240分鐘在40%到70%之間循環,而溫度在540分鐘內從20°C變化到40°C。探針與參考傳感器吻合良好,證實了相對濕度測量已針對溫度進行了校正。lambdao,kRH和kT的典型值分別為1500~nm、sim 1 pm/%RH和sim 10 pm/^circC。傳感器的響應時間受限于獲得中心波長測量的皮米分辨率所需的采樣和平均。校準后,我們估計相對濕度讀數的絕對精度約為pm 12%RH。
在討論非等溫條件下的水蒸氣傳輸時,我們發現將相對濕度數據轉換為水蒸氣壓(PH2O)數據很有幫助。雖然相對濕度反映了在特定溫度下水蒸氣的活度,但PH2O反映了該溫度下水的實際濃度(壓力)。(為了強調RH和PH2O之間的重要區別,考慮在80^circC和20%RH下的空氣所含的水分(PH2Osim 0.10~atm)遠多于在10^circC和80%RH下的空氣,其中PH2Osim 0.01~atm。)為了在本文中在RH和PH2O數據之間進行轉換,我們使用了以下水飽和壓力的標準多項式表達式:

其中PH2O是水蒸氣壓(atm),RH是相對濕度(%),T是溫度(^circC)。
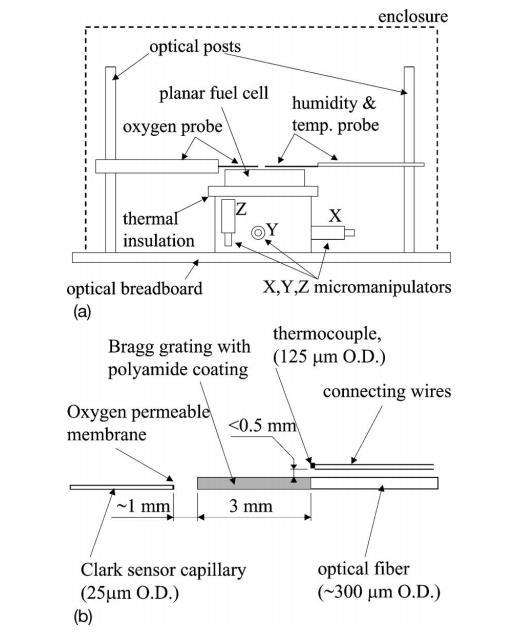
實驗設置—圖3a示意性地說明了自呼吸燃料電池陰極微傳感器探測實驗的配置。平面自呼吸燃料電池附著在XYZ微操作臺上方,開放式陰極端面朝上。電池通過絕緣層與XYZ臺熱絕緣,并通過外殼與環境對流屏蔽。溫度、氧分壓和相對濕度傳感器安裝在剛性光學立柱上,這些立柱又固定在一個剛性光學面包板上。所有三個傳感器對齊,使它們匯聚在自呼吸燃料電池陰極中心部分上方的一小片空間區域。傳感器的相對位置在圖3b中以放大細節顯示。自呼吸燃料電池放置在連接到同一光學面包板底座的XYZ臺上,確保了一個堅固、機械完整的剛性組裝體。XYZ臺允許精確控制陰極表面和傳感器之間的位移。Clark毛細管傳感器和光纖布拉格傳感器以共線方式排列,傳感器尖端之間的間距小于一毫米。熱電偶導線在空氣中與光纖平行布線。實際的熱電偶位于布拉格光柵起點上方不到半毫米處,位于光纖上方。整個實驗裝置被遮蔽在一個部分封閉的結構內,以最小化實驗室環境中發生的強制流動對燃料電池陰極上方自然對流羽流的影響。
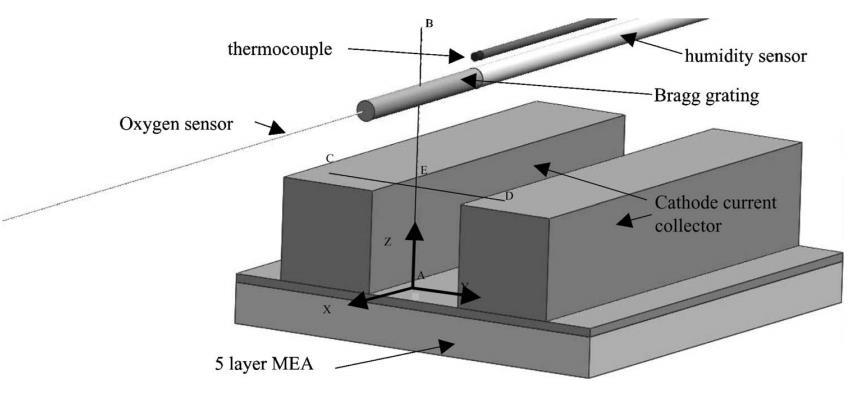
極化、剖面和瞬態測量期間平面陰極和傳感器組件的相對位置詳見圖4。傳感器組件包括氧氣傳感器毛細管、帶有濕度敏感布拉格光柵的光纖以及帶有導線的熱電偶。傳感器始終彼此平行并與陰極肋平行排列。在所有實驗過程中,傳感器之間的相對排列保持固定。幾何點A(y=0~mm,z=0~mm),B(y=0~mm,z=sim 6~mm),C(y=-1.52~mm,z=sim 0.16~mm),D(y=1.52~mm,z=0.16~mm)和E(y=0~mm,z=1.6~mm)定義了實驗過程中傳感器組件(以布拉格光柵的幾何中心為參考)的軌跡和位置(所有實驗中x=0~mm)。線EB和CD分別代表z(垂直)和y(水平)移動過程中傳感器組件的軌跡。相對濕度z剖面是使用改進的傳感器組件沿AB線測量的。在極化和瞬態掃描期間,傳感器組件位于點E。坐標系原點位于陰極活性區域的幾何中心,光纖接觸陰極網的頂部。
測量程序—新的MEA會經歷一個"活化"期,在使用過程中電阻逐漸減小。我們通過在環境溫度和濕度下將每個新膜在電池中以0.5 V電壓條件下工作10小時來避免初始瞬態效應。此外,我們在每次實驗前對燃料電池進行預處理。首先,我們用干燥壓縮空氣吹掃陽極室和陰極表面以去除任何冷凝水。接下來,我們用氫氣吹掃陽極室并密封陽極。在每次實驗之前,我們在900 mA(100 mA/cm2)恒定電流下運行電池15分鐘。
極化掃描—對于這些掃描,傳感器組件位于z=~1.6 mm,y=0 mm(在流道中間,與陰極肋頂部齊平),參見圖4中的位置E。通過以450 mA(50 mA/cm2)的步長增加燃料電池電流,每次步長持續5分鐘,直到電池電壓降至0.4 V閾值以下,來獲取電流-電壓極化掃描(I-V曲線)。微傳感器組件持續跟蹤溫度、相對濕度和氧分壓。在每次電流階躍之后,我們讓燃料電池電壓在5分鐘內穩定下來,然后記錄結束時的電池電位、溫度、相對濕度和PO2。隨后根據測得的溫度使用公式3將相對濕度讀數轉換為PH2O值。
剖面掃描—通過將燃料電池在固定的微傳感器組件下方移動來提取空間分辨的濃度和溫度剖面。在水平y移動期間,傳感器組件相對于陰極的位置從點C(z=1.6 mm,y=-1.5 mm,第一個陰極肋的中心,與陰極肋頂面齊平;點C)逐漸改變到點D(z=1.6 mm,y=1.5 mm,相鄰陰極肋的中心,與陰極肋頂面齊平)。另見圖4。
氧分壓和濕度在單獨的垂直z移動中測量。在相對濕度z移動期間,傳感器組件相對于陰極表面的位置從起點(z=1.5 mm,y=0 mm,陰極流道中心,與陰極肋頂部齊平,另見圖4中點E)逐漸改變到終點(z=6 mm,y=0 mm,陰極流道中心,陰極表面上方6 mm,另見圖4中點B)。氧氣探針和熱電偶的小測量體積允許從流道底部開始進行PO2測量。氧分壓z剖面是使用改進的傳感器組件測量的。將帶有布拉格光柵的光纖從傳感器組件中移除,并將熱電偶移至Clark傳感器的氧滲透膜附近。此外,兩個傳感器都向下傾斜。這種傾斜使傳感器尖端能夠接近陰極流道底部而不會接觸陰極的其他部分。
對于所有剖面掃描,使用的最小平移步長為10 mil(254微米)。每次平移步驟后,讓電池重新平衡2分鐘,然后記錄溫度、相對濕度和PO2讀數。
瞬態測量—使用電流中斷技術研究瞬態效應。首先將燃料電池在感興趣的電流密度下調節30分鐘,以達到穩定的運行狀態。然后突然將電流降至零,并記錄燃料電池電壓、微傳感器溫度、氧分壓和相對濕度的瞬態響應。在這些瞬態測量期間,微傳感器組件位于y=0 mm,z=1.6 mm(大約在燃料電池陰極中間,與流道肋頂部齊平,并大致位于流道中心),參見圖4中的點E。
量化了傳感器的本征響應速度,以確定溫度、氧分壓和相對濕度探針是否足夠快,能夠跟上觀察到的燃料電池瞬態現象的速度。通過使每個傳感器經受刺激的快速變化來測量本征響應速度。該分析的結果在圖5a和圖5b中提供。
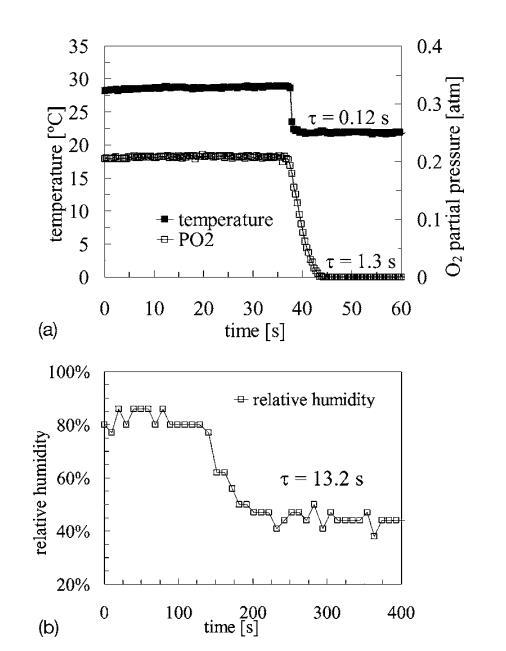
將熱電偶首先放置在熱板表面上方,然后迅速從熱板上方移開,使其經受從29°C到21°C的突然溫度變化。將氧氣傳感器首先封裝在一個充滿環境空氣的小體積外殼中,然后用氬氣流置換外殼中的空氣,使其在恒溫下經受PO2從0.21到0 atm的突然變化。將相對濕度傳感器首先放置在與環境溫度相同但濕度高于環境的環境試驗箱中,然后將其從環境試驗箱移至環境環境中,使其經受RH從80%到45%(恒溫下)的突然變化。我們近似這些誘導變化的時間常數分別為<0.01 s、<0.1 s和<2 s。
通過將瞬態信號上升時間擬合到單指數函數來量化傳感器響應速度,得到每個傳感器的響應時間常數tau。該分析得出該分析得出τ熱電偶=0.12 s,τo2傳感器=1.3 s和TRH傳感器=13 s。該分析表明,熱電偶足夠快,可以研究本文討論的瞬態燃料電池現象。然而,PO2和RH傳感器的速度在某些情況下與觀察到的燃料電池PO2和RH瞬變過程相當,使得對這些瞬態數據進行定量分析變得困難。PO2傳感器的速度主要受限于氧氣通過氧選擇性傳感器膜的擴散速度,而RH傳感器的速度主要受限于(實時)平均和實現pm級中心波長分辨率所需的曲線擬合。
 相關新聞
相關新聞